Ученые создали мышечную систему для роботов и андроидов
Учёные Университета Иннополис совместно с коллегами из Лондонского Университета Королевы Марии разработают робототехническую систему, человеко-машинный интерфейс, систему управления и привод на основе скручивания нитей для помощь в работе на производстве. Об этом рассказали в Университете Иннополис.
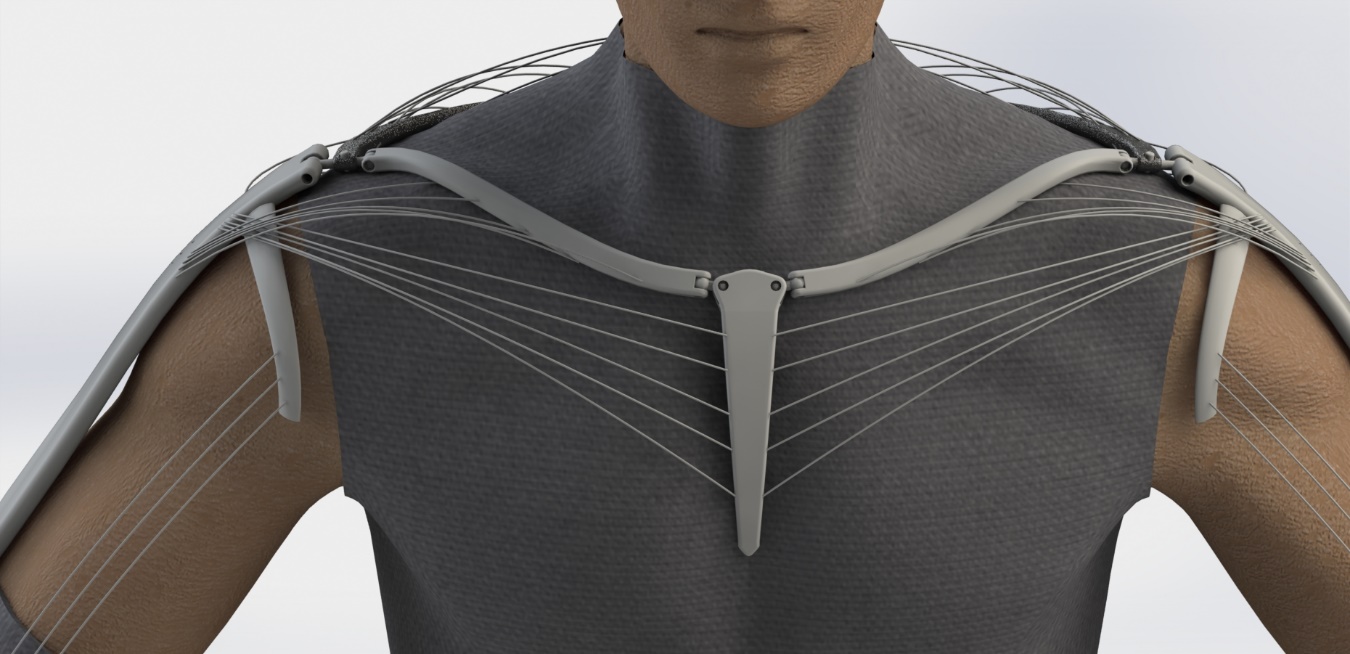
Разработчики Центра компетенций НТИ по направлению «Технологии компонентов робототехники и мехатроники» на базе Университета Иннополис, в которую входит лаборатория, предложили создать робототехнические устройства с приводами на основе скручивания нитей. Речь идет о нескольких тонких тросах , которые сокращаются, закручиваясь от электрического двигателя.
Новая система создается для работы:
на производстве,
для переноса тяжестей,
для функциональной реабилитации конечностей после инсульта.
Такие разработки станут помощниками работников в промышленности, логистике, транспортировке, сельском хозяйстве. Это сейчас востребовано, потому что падает привлекательность физического труда и повышаются требования к качеству и количеству выпускаемой продукции. Другая значительная категория населения — пожилые люди и люди с нарушениями опорно-двигательного аппарата, которым нужна помощь в повседневной жизни: прием пищи, подъем по ступенькам, перенос предметов и обеспечение мобильности. Долговременным решением данной проблемы станет использование носимых роботизированных систем, способных реагировать на команды человека и помогать ему в решении необходимых задач.
Игорь Гапонов, руководитель Лаборатории мехатроники, управления и прототипирования.
Как рассказали в Университете Иннополис, они первыми в мире получат результаты исследования нервно-мышечной активности человека во время взаимодействия с устройствами на основе приводов на скручивании нитей: на основе этих данных разработку будут оптимизировать.
Авторы надеются, что их работе окажет прямое влияние на развитие областей ассистирующей и реабилитационной робототехники, а также взаимодействие человека и машины.
Leave a Reply